|
|
Sen LI | 李森
英文简历 | 中文简历 |
|
|
|
Sen LI | 李森
英文简历 | 中文简历 |
|
李森 是南方科技大学(Southern University of Science and Technology)的四年级博士生。 硕士毕业于广东工业大学自动化学院控制科学与工程专业,本科毕业于广东工业大学粤港机器人学院电子信息工程专业。 研究方向包括柔性机器人、深度学习、仿生策略、轨迹规划、动力学及算法应用。
博士研究生, 智能制造与机器人
博士研究生在 MainDL 实验室 & BionicDL 实验室
导师: Assistant Prof. 万芳 and Assistant Prof. 宋超阳
工学硕士, 控制科学与工程
硕士研究生在 Jet Power & Humanoid Robotics
实验室
导师: Associate Prof. 黄之峰
工学学士, 电子信息工程
推荐免试研究生
访问学生 at 科学与设计冬令营
Advisor: Prof. Jianxi Luo
研究助理 at 机器人研究所, 香港科技大学
|
|
Biomimetic Flip-and-Flap Strategy of Flying Objects for Perching on Inclined Surfaces 简要介绍: 从仿生学角度出发,通过模型分析揭示了昆虫在非水平壁面着陆时利用拍翅翻转缓冲的能量变化规律,提出了一种针对飞行器在垂直壁面上不减速降落的控制方法,并完成了样机测试验证。飞行器可以在3.4m/s的速度下实现壁面不减速降落。 主要职责: 通过建立数学模型模拟翻转拍打过程,对飞行物体的运动进行了分析;开展了深入研究并整理论文以供发表。 |
|
|
Determinants of Robotic Wall-Flip Strategy
简要介绍:
通过分析跑酷者的动作,探究使机器人能够完成墙翻动作的关键指标。
主要职责: 建立简化模型,探究触壁空翻关键指标,以便于分析和设计机器人墙翻策略的反馈控制。同时,在 PyBullet 中对多关节机器人(Atlas)进行了动态仿真,以进一步验证该策略。 |
|
|
ActiveSPN: Active Soft Polyhedral Networks With Pose Estimation for In-Finger Object Manipulation 简要介绍: 提出了一种新的可驱动柔性多面体网络(ActiveSPN),利用可驱动非仿生表面实现精确手内操作的夹爪设计。 全向自适应柔性手指中集成的视觉系统进一步提高了夹爪对物体位姿的感知能力。 主要职责: 设计并制造了 ActiveSPN 的机械结构;开发了位姿估计学习框架和手内操作运动学算法;策划并执行实验并进行数据分析; 撰写论文。 |
|
|
Multi-Modal Vision-Based Deformable Perception for In-Finger Manipulation with Soft Active Surfaces 简要介绍: 提出了 ActiveSPN2,一种用于受限环境下手指内操作的机器人夹爪,配备柔性可驱动表面,并通过基于视觉的感知形变框架实现多模态感知。 通过跟踪内部柔性多面体网络的实时变形,我们实现了实时多模态视觉感知,在手内操作过程中提供 6 维力和物体位姿估计。 主要职责: 设计并制造了 ActiveSPN2 结构;开发了多模态估计算法;进行了系列实验并进行了数据分析;整理论文稿件以提交发表。 |
|
|
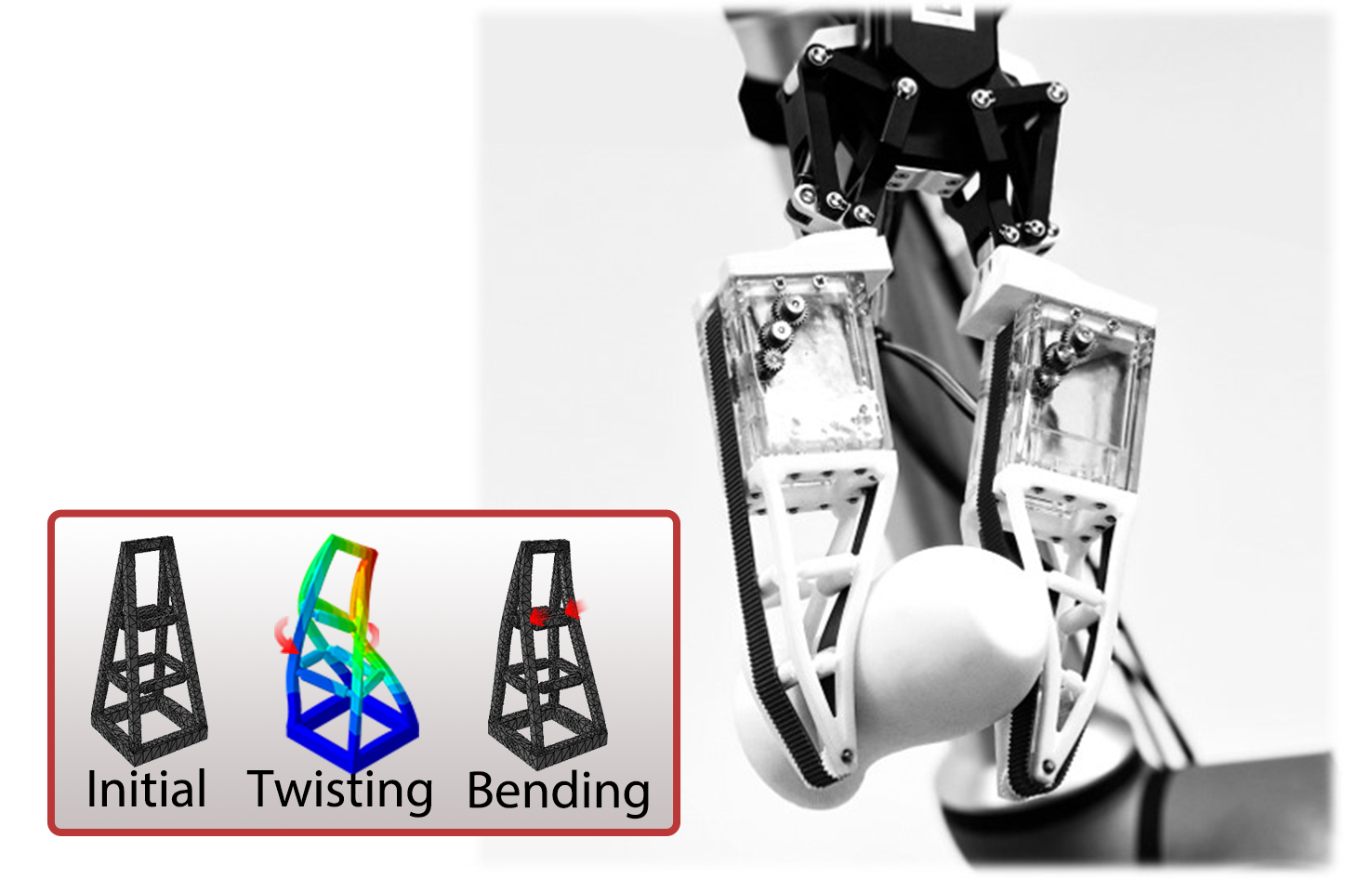
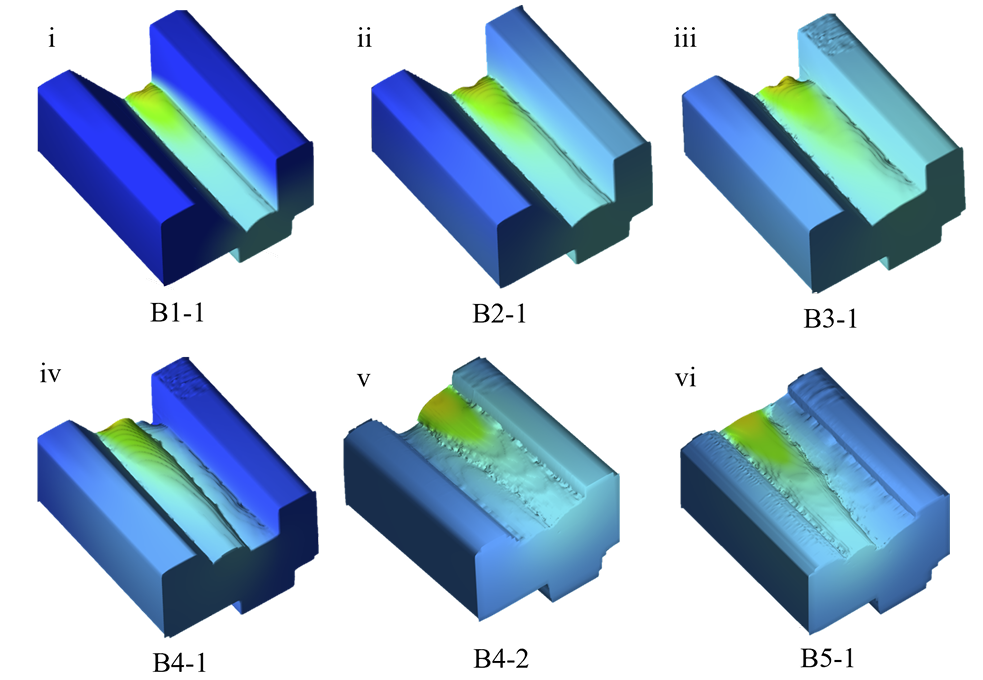
Active Surface with Passive Omni-Directional Adaptation for In-Hand Manipulation 简要介绍: 提出了一种具备全向自适应结构的柔性机器人手指设计,其表面为主动可驱动式,可方便地安装在现有夹爪上,并在手内操作中实现稳定性与灵活性。 主要职责: 设计了一种将主动表面与全向自适应结构相结合的软性机器人手指,进行了有限元仿真与分析。 |
|
|
Teaching oral care via vision-based deformation perception 简要介绍: 提出一种基于基于视觉的形变感知的新型、经济高效的传感器平台,用于社区口腔健康教育。 该系统集成了 3D 打印的热塑性聚氨酯软结构与刚性树脂框架和 ArUco 标记,实现准静态与动态条件下高精度力与力矩预测。 主要职责:完成模型渲染,开展有限元分析。 |
|
|
ADAP: Adaptive & Dynamic Arc Padding for Predicting Seam Profiles in Multi-Layer Multi-Pass Robotic Welding 简要介绍: 提出了一种自适应与动态弧形填充多层多道(ADAP)焊缝的方法。ADAP 利用基于图像的边界及由弧心和半径定义的基本弧几何,对焊道进行估计。 主要职责: 设计了耐高温的柔性结构与触觉学习框架,基于3D视觉识别焊道对轨迹进行粗定位,后根绝触觉实时修正焊道轨迹,完成焊道跟踪。 |
|
|
Trajectory Tracking on Universal Robots 简要介绍: 本研究提出了一种基于动作捕捉系统的双机械臂标定方法,并实现了双机械臂的轨迹跟踪运动。
|
|
|
Coordinate Measuring Machine (CMM) Project
简要介绍: 本项目旨在实现工件的精确定位与加工。
基于工件的模板文件或粗略位置,坐标测量机(CMM)能够通过在工件表面自动生成的点云采样,输出工件的精确测量结果。
主要职责: 设计算法,根据少量采样数据自动生成工件表面的测量路径。
测量精度控制在 2 微米以内。
|
|
|
Research on algorithm of cooperative work of Dual Six-Axis Manipulator
简要介绍: 设计了算法,实现从机械臂主臂到从臂的跟随控制,以及从臂的独立轨迹叠加执行。
主要职责: 完成了位置与姿态规划算法的仿真,并设计了轨迹跟踪及轨迹叠加算法。
|
|
|
HKUST One Million Dollar 简要介绍: 来自30家知名机构的10支创业团队来到主办方举办的创业营参加训练,以展示其项目和路演,角逐创业资金。 主要职责: 与执行副主席袁冶、柳松和刘珺讨论并确定课程安排,协助教授授课,带领参观知名公司(大疆创新、汇川科技),帮助学生完成原型设计并推进其项目。
|
|
|
Rock–Paper–Scissors based on vision 简要介绍: 基于图像分类技术的动态手势跟踪与识别程序,可识别“剪刀石头布”游戏中对手的手势,并即时做出反应以击败人类玩家。 |
|
|
Gesture Control of Moving Chassis
简要介绍: 使用设计的数据手套,通过手势控制麦克纳姆轮小车实现全方向移动。
主要职责: 完成底盘程序开发,包括底盘驱动和遥控信号解码。
|
|
|
ROBOCON 简要介绍: 以“羽球双雄”机器人为机器人学院考核,通过考核后代表广东工业大学首次参加全国大学机器人竞赛,主题为“清洁能源”和“舞盘雅乐”,进一步磨砺工程能力。 主要职责: 参与羽毛球机器人、清洁能源机器人、飞盘机器人的设计,担任羽毛球机器人的操作员。主要负责麦克纳姆轮底盘的控制和发射器的控制。 |
|
|
Self-stabilization of Quadrotor 简要介绍: 使用开源飞控,仅依靠 IMU 驱动四旋翼,实现自稳飞行。 |
|
|
Auto-tracking 简要介绍: 设计基于与非门的数字电路,并通过卡诺图(K-map)进行简化。 |

 Orcid
Orcid